近日,南京航空航天大学磁悬浮及振动控制实验室(MLVC)在电气工程及其自动化领域取得新进展。 团队学术论文《Three-Phase Segmented Modulation Method for Torque Ripple Suppression in Brushless DC Motor》(一种用于抑制无刷直流电机转矩脉动的三相分段调制方法)在国际期刊《Journal of Electrical Engineering & Technology》上正式发表。该论文由实验室周扬博士后担任通讯作者,硕士研究生游沂锟为第一作者,姚润晖博士、郑安硕士及周瑾教授参与共同研究。南京航空航天大学为论文第一完成单位。
无刷直流电机(BLDCM)凭借其紧凑结构、高功率密度及优异的可控性,在航空航天、工业机器人及精密制造等高端装备领域发挥着关键作用。然而,受限于非理想换相过程,电机换进相与换出相的电流变化率往往难以匹配,导致显著的转矩脉动。这一问题严重制约了该类电机在高精度伺服系统中的性能表现,是行业内亟待解决的共性难题。针对这一问题,现有控制策略在平衡低速换相时间、简化控制逻辑与降低开关损耗方面仍存在优化空间。
为了解决以上问题,该论文提出了一种三相分段调制(TPSM)策略。该策略创新性地根据三相开关管状态将PWM周期划分为四个区间,并基于“最大化换相速度”原则动态分配占空比。通过协同控制三相电流变化率与换相时间,成功实现了非换相相电流的快速、平滑过渡。与传统混合切换控制相比,TPSM策略不仅简化了PWM控制模式,且无需增加额外的硬件成本,显著降低了系统的开关损耗,具有较高的工程应用价值。
为全面验证该策略的有效性,团队自主搭建了基于dSPACE控制器的实验验证平台(如图2所示)。实验涵盖了低、中、高不同占空比及负载工况(d=0.3至0.9)。严谨的数据分析表明,TPSM策略在全速域范围内均表现出优异的脉动抑制能力:在低速换相条件下,系统转矩波动降低约 54.49%;在高速换相条件下,转矩波动降低约 29.50%。此外,实验数据还显示,在低占空比工况下,该方法显著提升了电机输出功率(最高提升约41%),有力验证了其在提升系统稳定性与能效方面的双重优势。
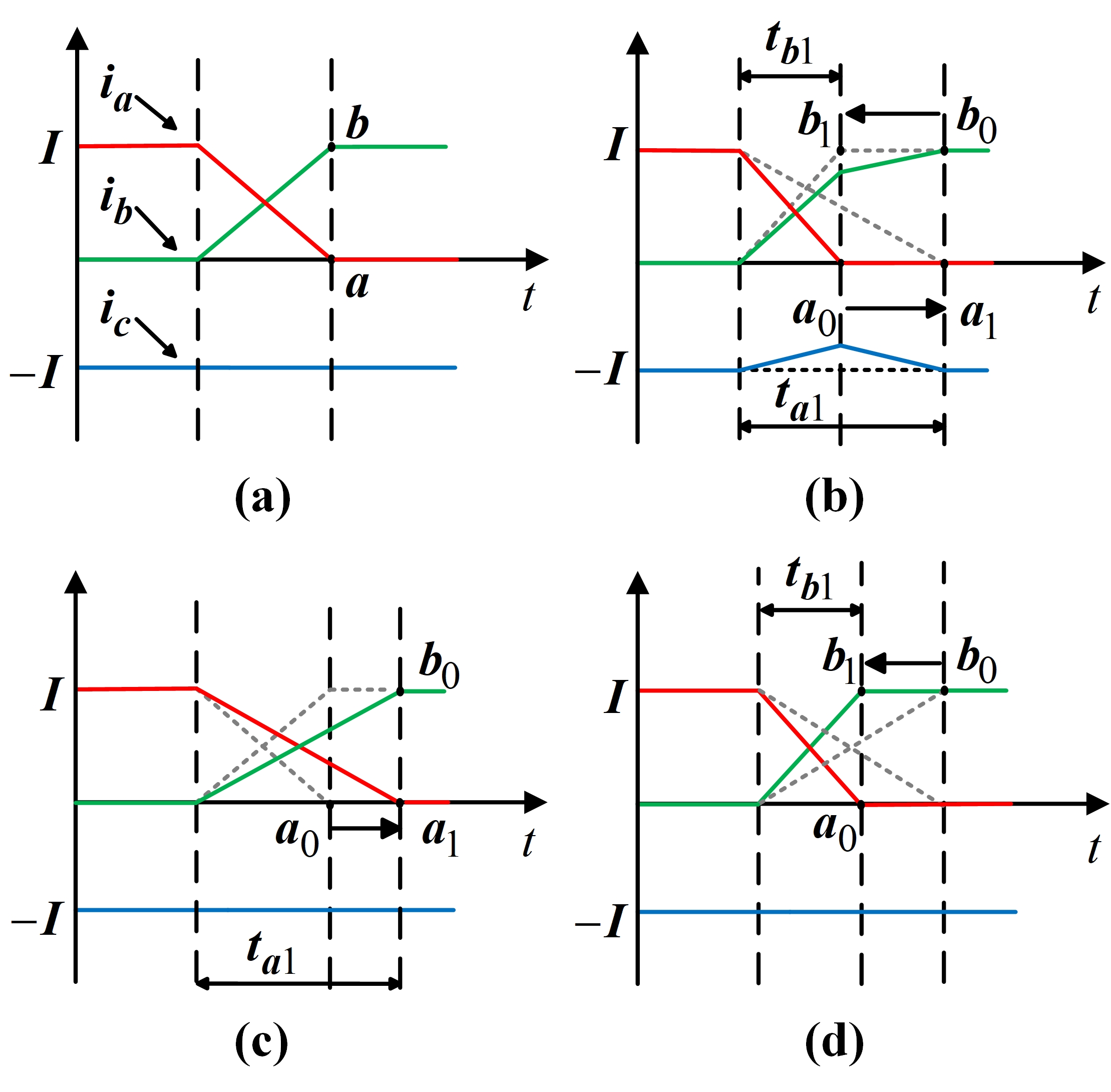
图1 保持非换相相电流稳定的控制策略,(a)最优电流换相;(b)在降低a相变化率的同时,提高b相变化率;(c)降低a相变化率;(d)提高b相变化率。
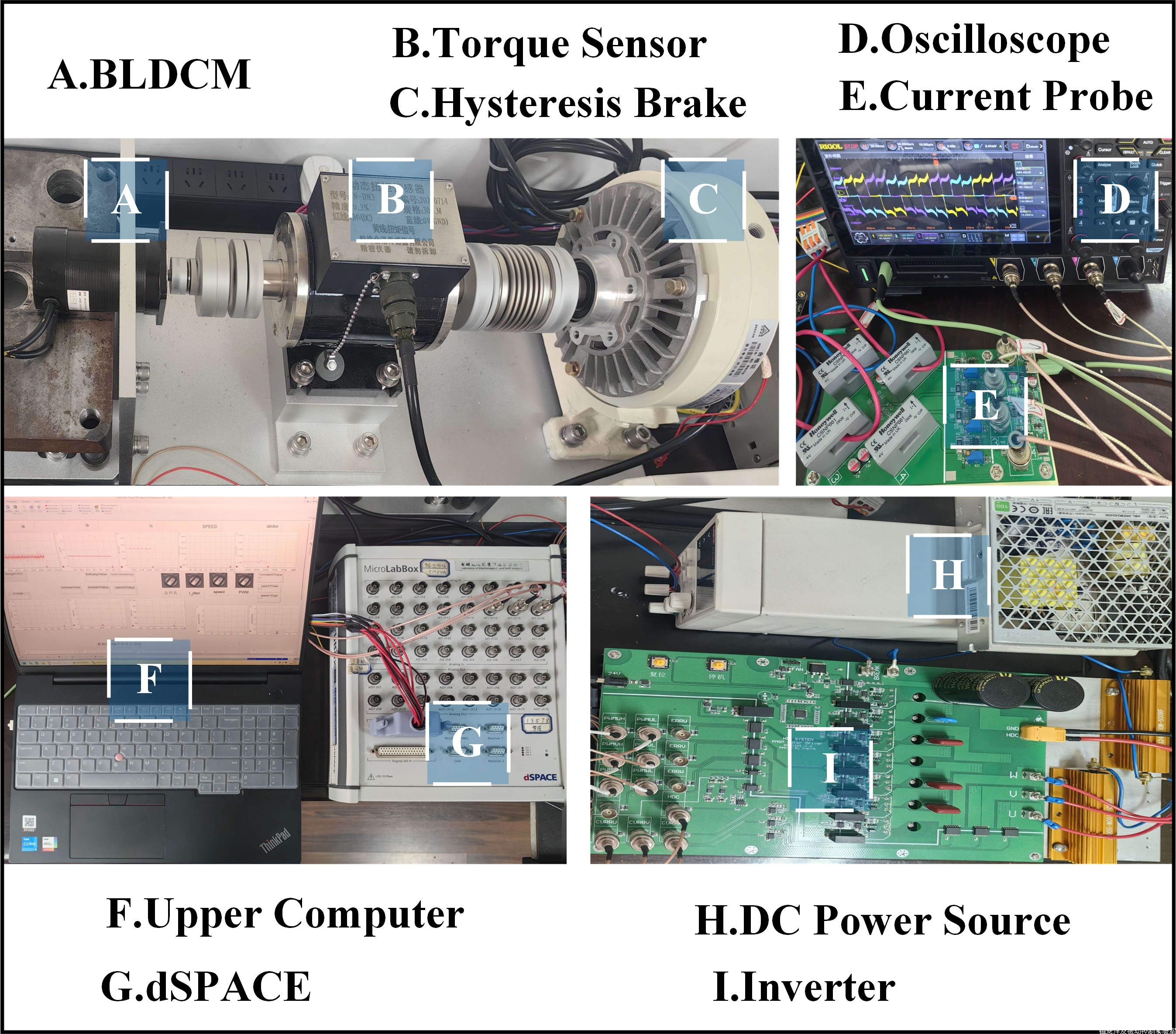
图2 换相转矩脉动抑制实验平台
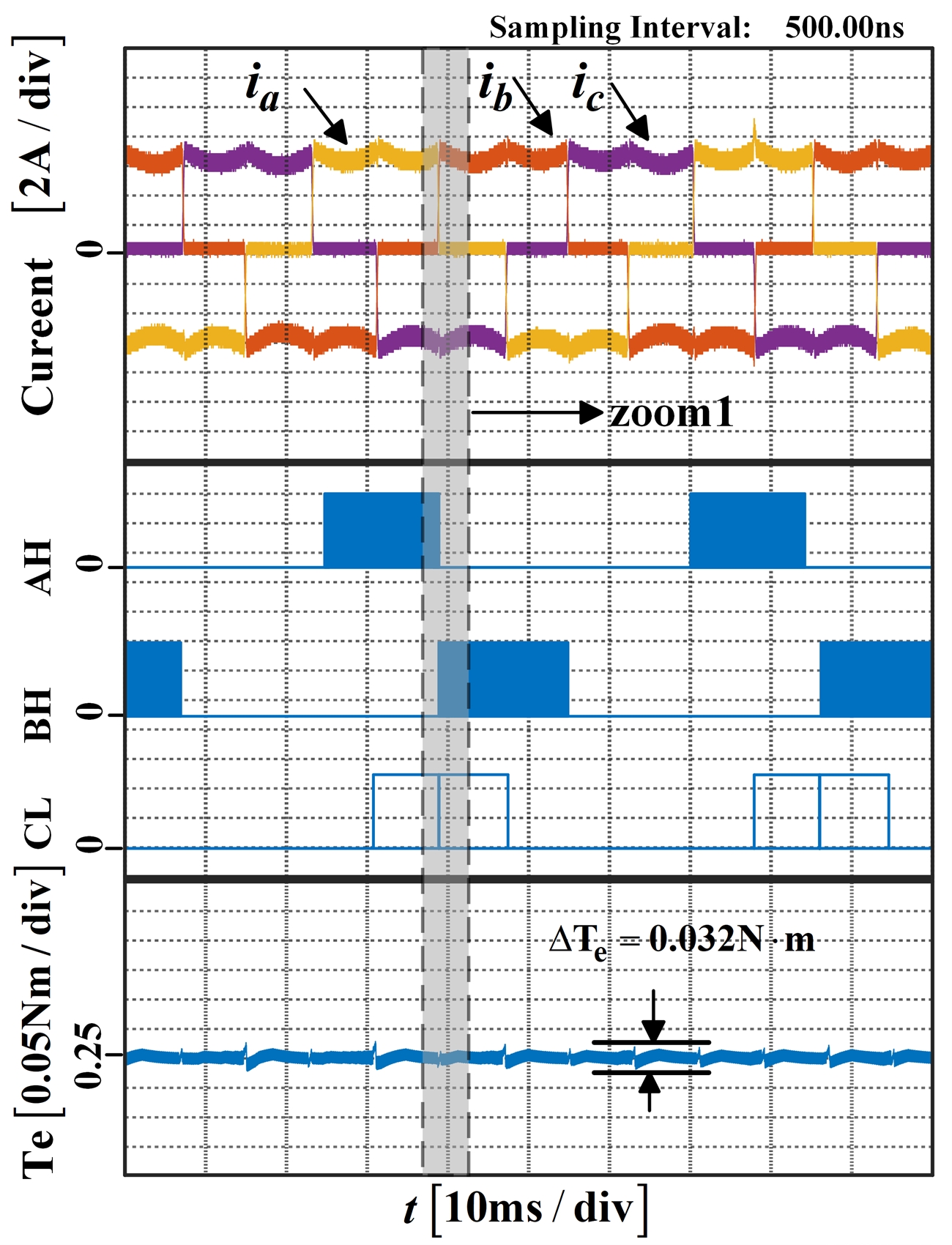
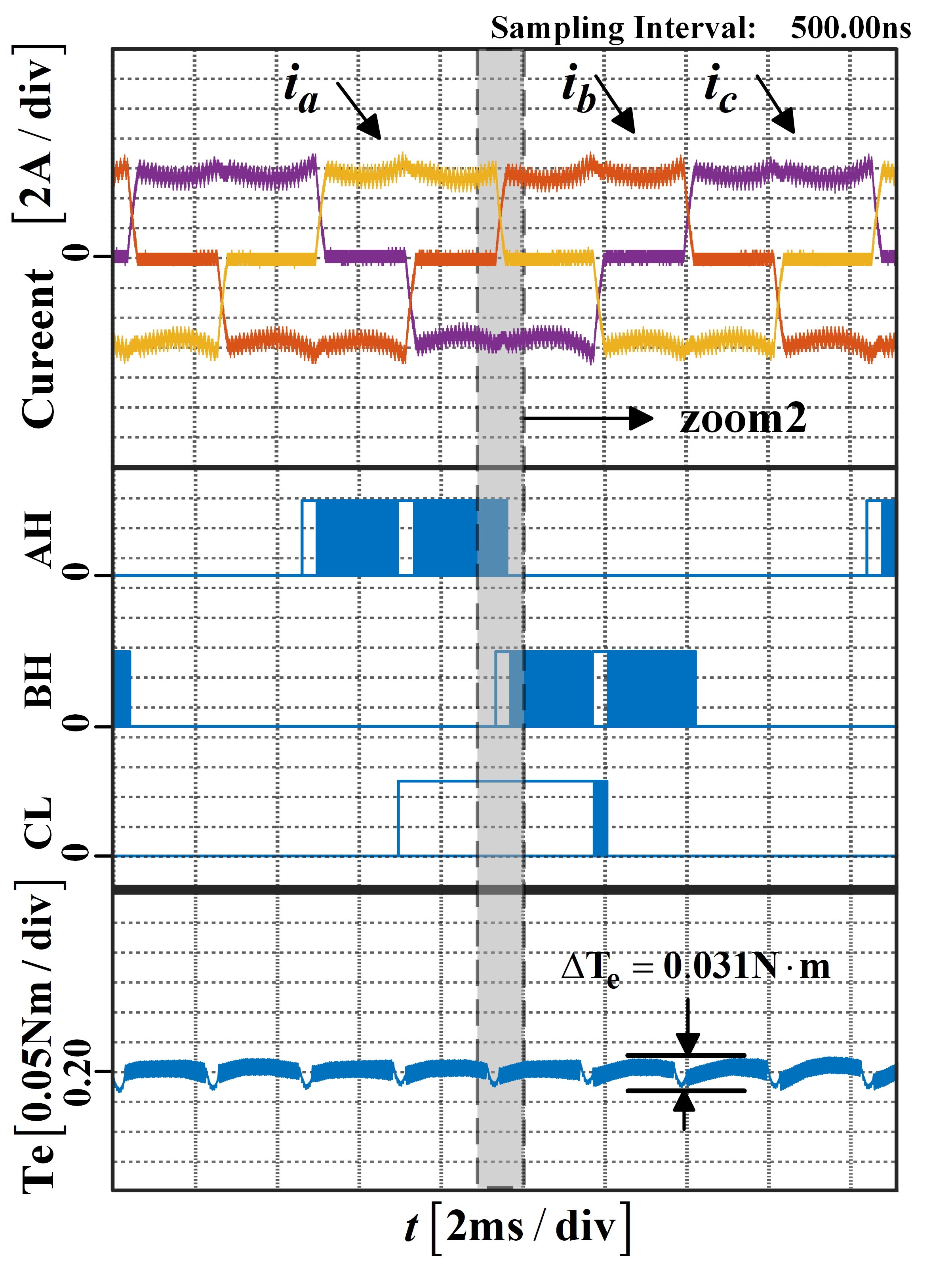
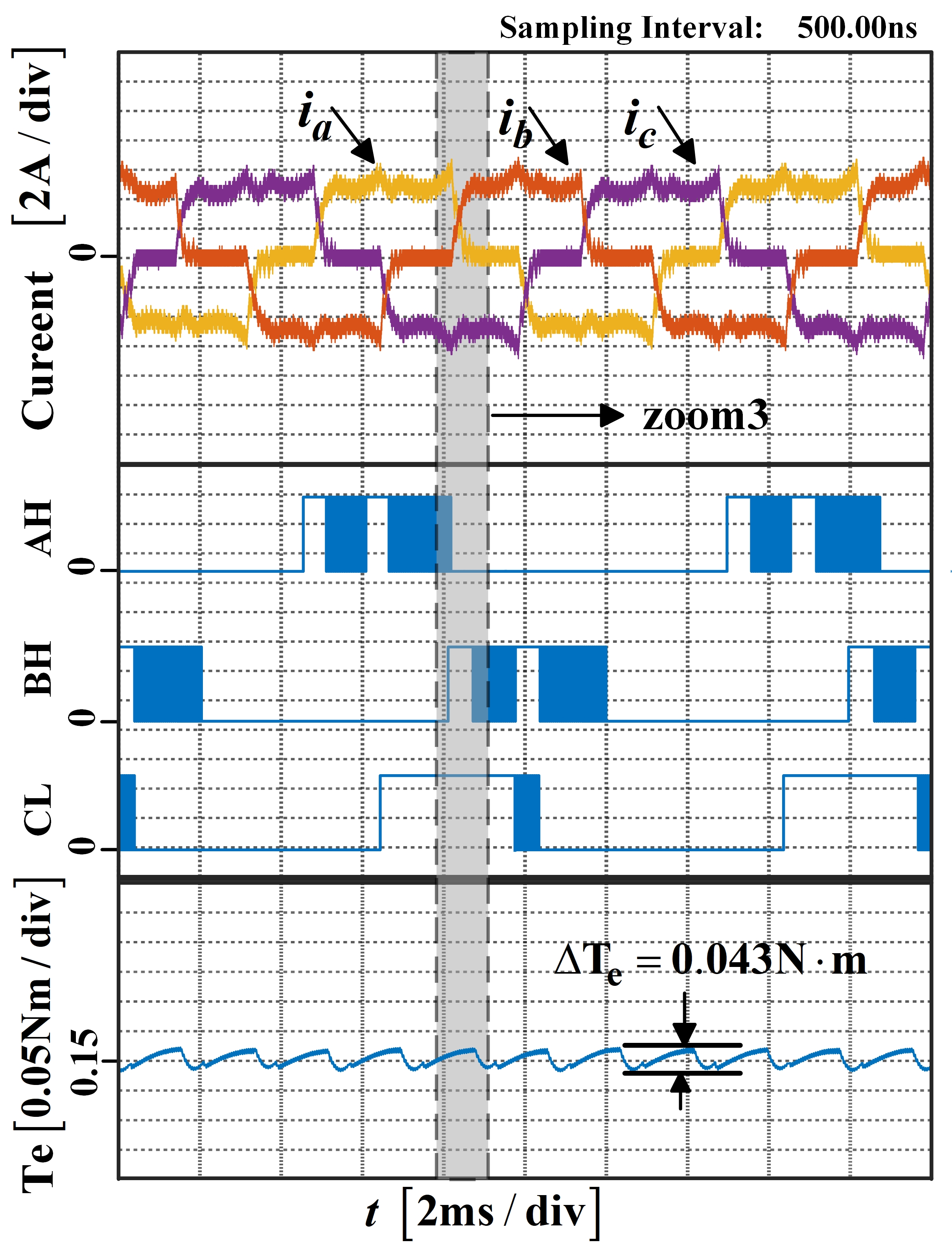
图3 所提方法在不同占空比和负载下的实验结果
论文链接:Three-Phase Segmented Modulation Method for Torque Ripple Suppression in Brushless DC Motor | Journal of Electrical Engineering & Technology | Springer Nature Link