近日,课题组在磁悬浮转子系统时滞辨识及控制领域相关工作以含时滞的磁悬浮转子系统延时设计自抗扰控制为题目,被EI期刊《振动工程学报》录用。课题组金超武教授为本文的通讯作者,硕士研究生洪震东为本文的第二作者,硕士生曹迎庆为本文的第三作者,教授周瑾为本文的第四作者,教授徐园平为本文的第五作者,南京航空航天大学为第一单位。
时滞的存在会导致系统抗干扰能力减弱,本文针对含时滞的磁悬浮转子系统提出一种延时设计自抗扰控制器(DD-ADRC),通过主动在控制器输出与ESO之间进行延时,去除观测回路中时滞的影响,提高ESO在时滞系统中的扰动估计能力。DD-ADRC 在使用的过程中需要已知系统内部固有的时滞量,因此本文提出一种互相关时滞辨识方法来对系统内部固有时滞量进行辨识。最后,在仿真平台中,将DD-ADRC与PID和线性自抗扰控制器(LADRC)进行比较,验证控制方法的性能,并在实验中对系统内部固有时滞量进行辨识,将辨识结果引入DD-ADRC观测器的延时环节中,保证实验中DD-ADRC的观测回路延时量的准确性。
本文所采用的时滞辨识算法和控制方法均首次在磁悬浮转子系统中应用。仿真与实验结果表明:互相关时滞辨识法能够稳定的对系统进行时滞辨识;DD-ADRC能够拓宽ADRC在时滞系统中的使用性能,特别是在观测带宽上限和可用时滞范围方面;DD-ADRC的转子位移二范数与PID相比,其降幅在70%以上,扰动抑制效果明显。
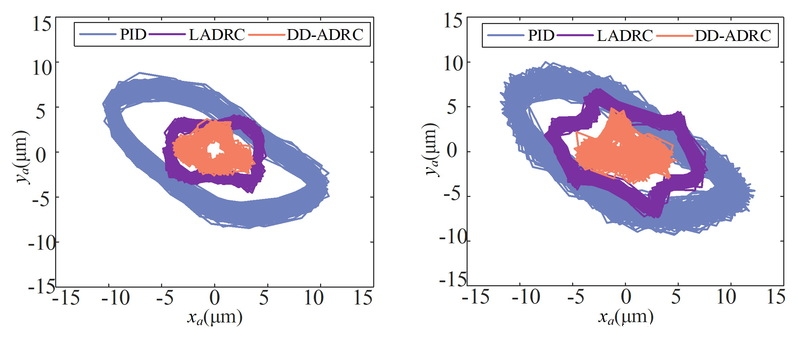
(a)τ=150μs (b)τ=20μs
图1 不同控制方法转子旋转效果对比
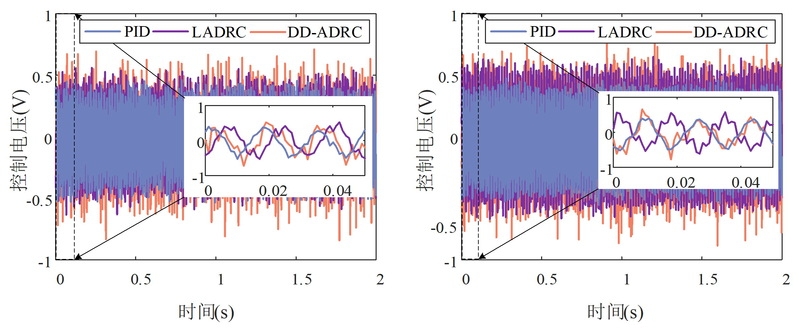
(a)τ=150μs (b)τ=20μs
图2 x方向上对应控制电压
论文链接:待更新