近日,课题组在螺栓连接界面及磁悬浮轴承领域相关工作以“Investigations on the modal vibration caused by bolted joint interface contact in the rotor-AMBs systems: modelling and experimentation”为题目发表于期刊《Applied Mathematical Modelling》。课题组周瑾教授为本文的通讯作者,博士研究生周扬为本文的第一作者,硕士王艺宇、博士张越、副教授徐园平分别为本文的第三、四、五作者,南京航空航天大学为第一单位。弗吉尼亚大学林宗利教授为本文的第六作者。
磁悬浮轴承利用电磁力将转子悬浮在设定的工作位置,具有无机械接触、无摩擦无磨损、长寿命、免润滑、高速、高效率、主动可控等优点,已越来越多地应用于能源动力、污水处理、石油化工等工业领域的风机、压缩机、泵等旋转机械中。但是磁悬浮轴承-转子上安装叶轮的螺栓连接界面,极易诱发转子的自激振动。当自激振动严重时会危害系统的稳定运行,因此必须研究界面接触造成的自激振动特性及控制方法。本文围绕考虑界面接触的磁悬浮轴承-转子系统精确建模、动力学特性分析开展了理论、仿真和试验研究。
本文建立了考虑螺栓连接界面接触的磁悬浮轴承-转子系统模型。由于磁悬浮轴承是存在能量输入的有源系统,螺栓连接和圆柱配合的非连续接触界面在电磁激励下产生激发转子自激振动的内部时变扰动。为表征这种界面扰动对磁悬浮轴承-转子系统的影响,提出了考虑接触状态的时变接触力模型,并以正反馈的形式加入到闭环系统模型中。该时变接触力模型由接触界面相对位移、接触刚度、接触区域三部分构成,通过推导用于表征连接界面间的力-位移关系的等效附加刚度矩阵,获得电磁激励下界面间的相对位移;通过采用基于分形理论和赫兹接触理论的粗糙界面微观接触模型,计算装配载荷在接触界面产生的接触刚度;考虑界面接触状态时变特征,通过坐标变换和空间几何投影得到实际界面接触区域。基于以上建立的模型,开展系统动力学特性计算及分析,采用控制变量法分析了螺栓预紧力矩、接触半径等接触参数振动幅值的影响,并分别开展相应的试验验证。数值仿真和试验结果的一致性验证了模型和响应求解方法的准确性,结果表明:随着螺栓预紧力矩或螺栓连接半径的增加,振动幅值随之增加。基于以上参数对自激振动的影响规律,提出了避免自激振动的界面接触参数设计指导准则。将电磁力和接触力以负刚度的形式引入到机电一体化模型状态矩阵中,通过该状态矩阵计算闭环系统特征根随参数的变化轨迹,以特征根实部小于零为系统稳定判据,在特征根轨迹中确定不同截止频率下的接触参数稳定域。
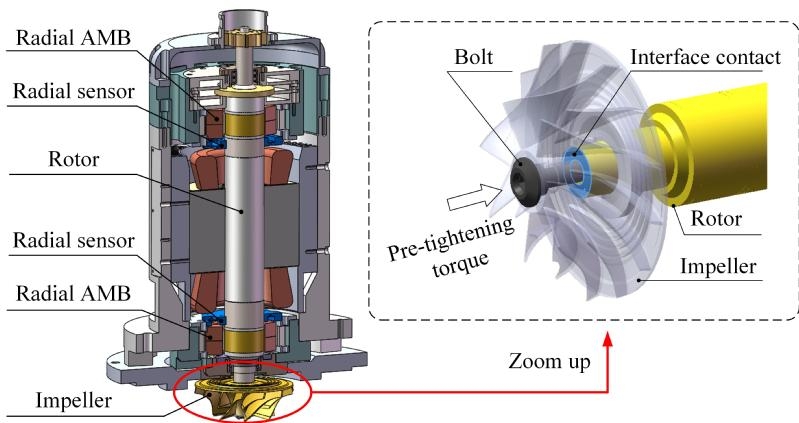
图1 磁悬浮旋转机械螺栓连接界面接触示意图
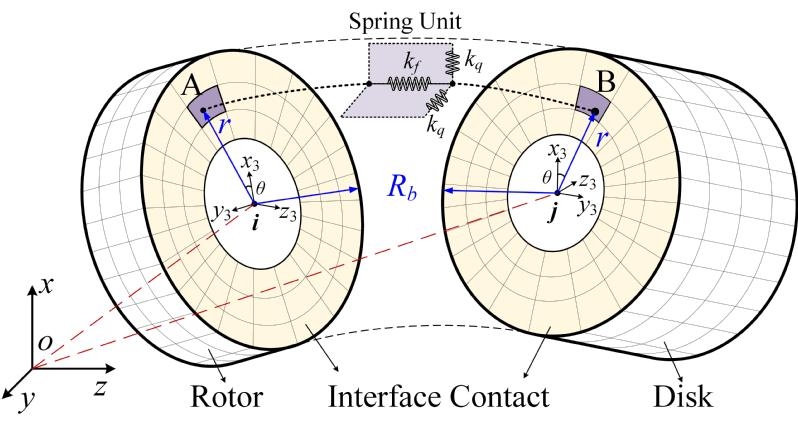
图2 螺栓连接接触界面建模示意图
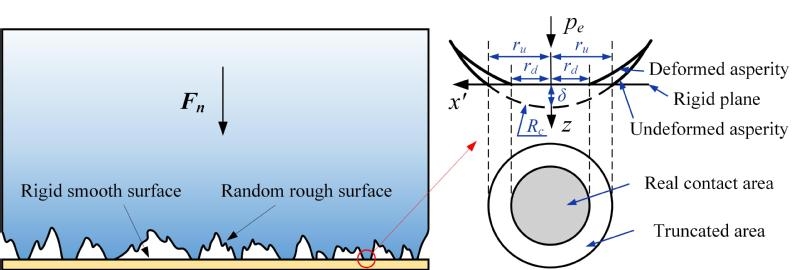
图3 刚性平面与粗糙面的接触示意图以及单个微凸体的几何变形示意图
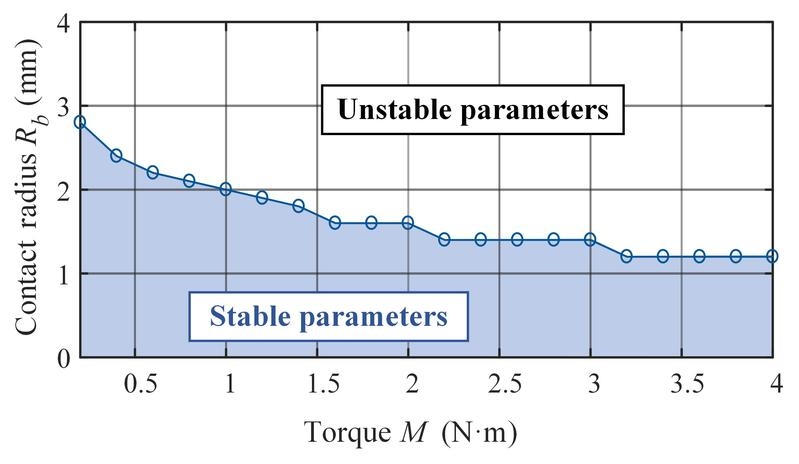
图4 螺栓连接参数稳定域
论文链接:待更新