近日,课题组在阻尼减振领域相关工作以“Modeling and control of helicopter flight control system with a controllable Semi-rotary fluid viscous damper”为题目发表于期刊《Alexandria Engineering Journal》。课题组周瑾教授、于敏教授为本文的通讯作者,博士生曹晓彦为本文的第一作者,金超武副教授、徐园平副教授分别为本文的第四、五作者,硕士生郭鑫星、王运志分别为本文的第六、七作者,南京航空航天大学为第一单位。
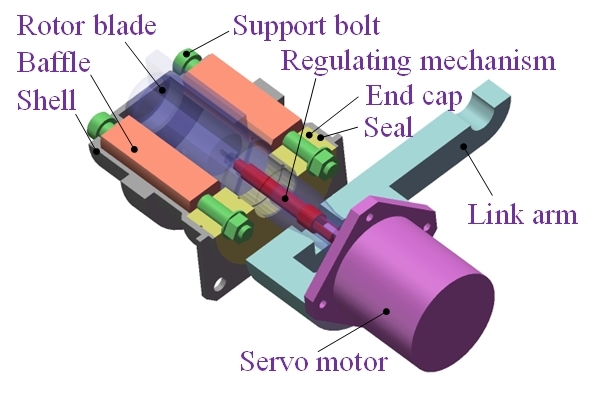
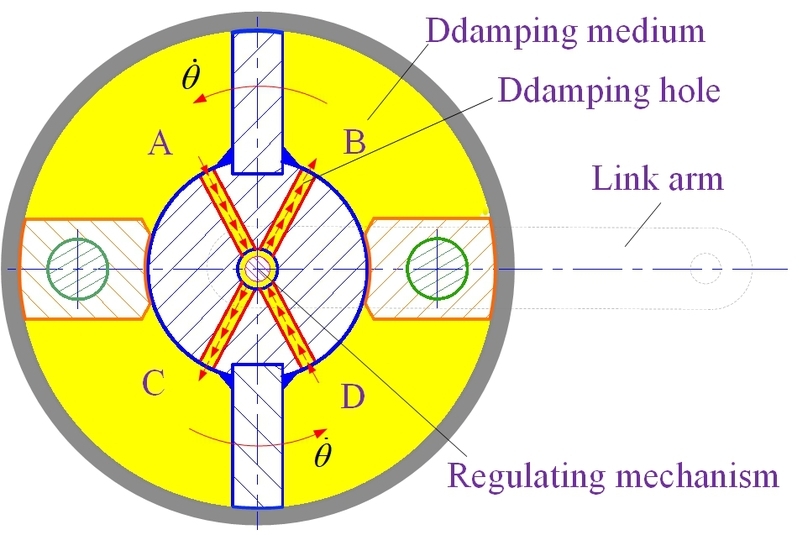
来自直升机旋翼、发动机和传动装置的力和力矩会产生振荡载荷,该载荷将导致直升机操纵系统(HFCS)的振动。HFCS过度振动会导致操纵杆系统抖动,从而导致驾驶员手臂不适。为了提高HFCS的操纵舒适性和降低振动响应,HFCS通常采用附加被动阻尼器来吸收振动能量。但由于其阻尼系数固定,传统的被动阻尼器不能满足复杂工况下HFCS减振需求。可控半旋转式流体阻尼器(CSFVD)作为半主动阻尼器家族的重要组成部分,因其能耗低、响应快、可靠性高、结构简单等优点而受到广泛关注。该阻尼器是提高HFCS操纵舒适性的良好选择。
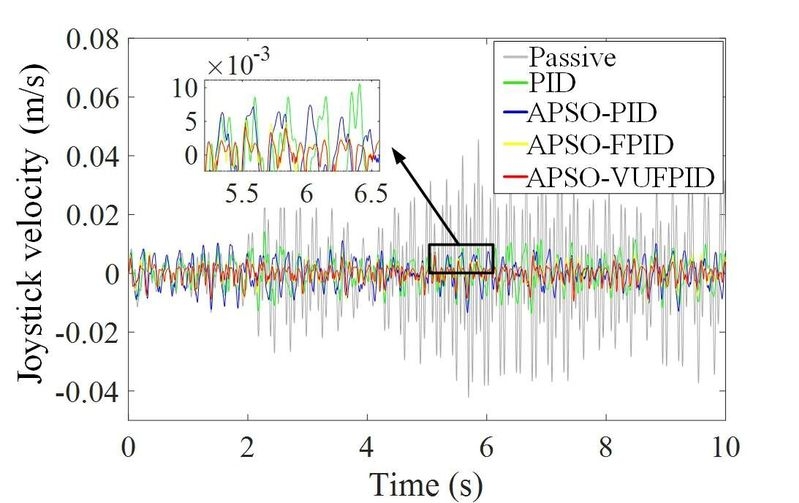
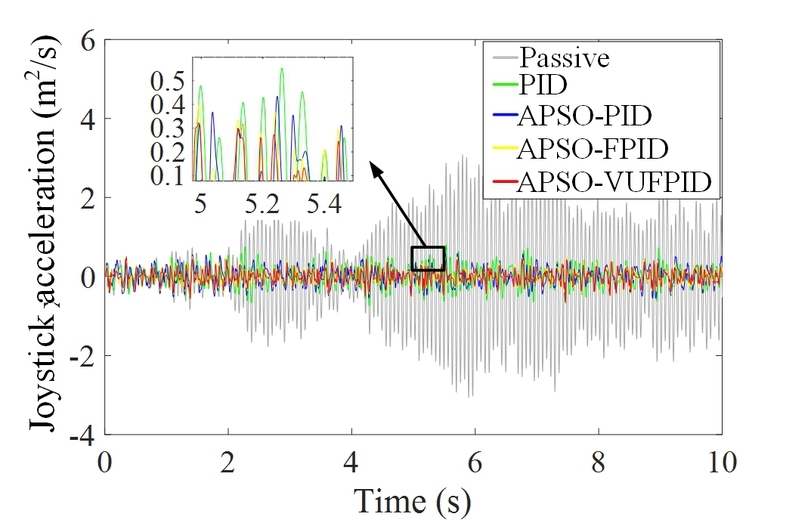
本文的主要研究内容:首先,根据CSFVD的力学试验结果,建立了阻尼器的双曲切线模型。然后,建立了HFCS的等效模型。为了提高操纵杆系统的减振性能,提出了一种实时产生所需阻尼力的APSO-VUFPID。最后,通过数值仿真和实验验证了所提出的APSO-VUFPID方法相对于被动、PID、APSO-PID和APSO-FPID具有更好的减振效果。结果表明,双曲切线模型能准确描述CSFVD的非线性力学特性。此外,相对于被动、PID、APSO-PID和APSO-FPID控制方法,所提出的APSO-VUFPID控制方法得到的加速度和速度幅值更小。因此,与被动、PID、APSO-PID和APSO-FPID控制器相比,所提出的APSO-VUFPID控制器具有更好的操纵舒适性。
论文链接:https://doi.org/10.1016/j.aej.2022.06.035