近日,课题组在基础运动及磁悬浮轴承领域相关工作以“Vibration Control of AMB-Rotor System Under Base Motions Based on Disturbance Observer”为题目发表于期刊《IEEE/ASME Transaction on Mechatronics》。课题组徐园平副教授和周瑾教授为本文的通讯作者,张越博士后为本文的第一作者,周扬博士后、法国国立应用科学学院(INSA Lyon)Jarir Mahfoud副教授分别为本文的第四、五作者,南京航空航天大学为第一单位。
磁悬浮轴承由于其无摩擦、无润滑、可主动控制等优点,在石油天然气、制造业、真空、洁净环境等领域得到了广泛的应用。当磁悬浮轴承支承的旋转机械受到海浪、地震、不平整路面等外界环境激励时,基础运动激励会影响转子动力学行为,进而影响设备的平稳运行。磁悬浮轴承可以对转子施加主动控制力,减小基础运动引起的过大振动,提高系统承受基础运动的能力。然而,目前用于基础运动的主动控制器需要额外的传感器或复杂的鲁棒性设计,难以平衡可靠性和适用性。本文围绕考虑基础运动的磁悬浮轴承-转子系统建模、基础运动振动控制开展理论与试验的研究,提出了一种扰动观测器控制方法,可以观测和抑制基础运动引起的扰动,无需增加额外传感器或更换常用的比例-积分-微分控制器即可实现振动控制,具有高可靠性与良好适用性。
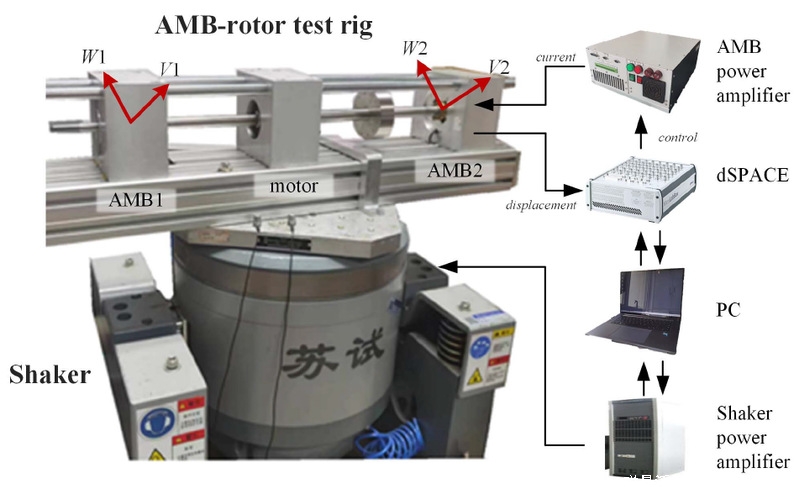
图1 考虑基础振动的磁悬浮轴承转子系统试验台
本文建立了考虑基础运动的磁悬浮转子系统机电一体化模型。为了描述基础运动下磁悬浮转子的绝对运动,建立了惯性坐标系、基础坐标系与转子坐标系,分析了坐标系之间的转换关系,建立了基础运动下磁悬浮转子系统的机电一体化模型。基于磁悬浮轴承-柔性转子试验台,通过模态试验、扫频试验、不平衡响应试验对模型进行了验证。为了抑制基础简谐运动引起的磁悬浮转子振动,提出了基于自适应窄带扰动观测器的主动控制方法。针对目前以基础激励加速度为参考的前馈控制方法需要额外传感器、复杂度高、适应性差等问题,提出使用扰动观测器观测基础运动引起的转子振动响应并抑制的方法。由于扰动观测器中低通滤波器可能引起抑振效果降低和系统失稳问题,提出了将低通滤波器改为以基础运动频率为中心频率的带通滤波器,从而提高了窄带扰动抑制效果,降低对系统稳定性的影响。针对基础运动频率未知或时变的问题,提出使用递推最小二乘法对带通滤波器中与基础运动频率有关的参数进行实时自适应调节,设计了一种自适应窄带扰动观测器,对参数自适应原理和设计方法进行了分析,通过仿真和试验证明了自适应窄带扰动观测器可以有效抑制基础简谐和冲击运动引起的磁悬浮转子振动。
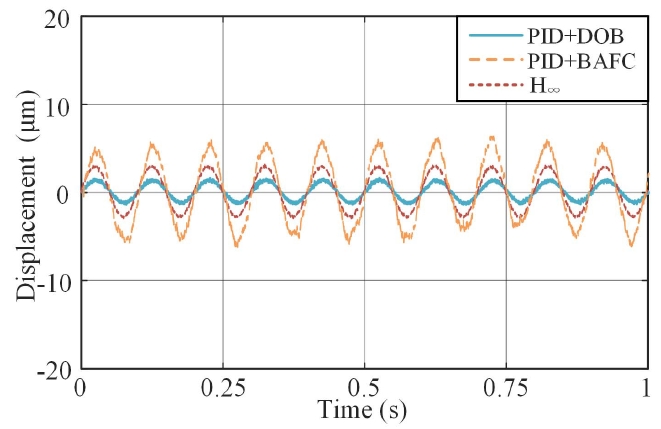
图2 谐波基础激励下控制器效果 图3 冲击基础激励下控制器效果
论文链接:https://ieeexplore.ieee.org/document/10981861