近日,课题组在磁悬浮轴承时滞效应领域相关工作以“Adaptive Smith Predictive Active Disturbance Rejection Control of Magnetic Suspended Rotor System Considering Time Delay”为题目发表于期刊《IEEE Transactions on Industrial Electronics》。课题组金超武教授为本文的通讯作者及第一作者,硕士生洪震东为本文的第二作者,崔刚博士、周瑾教授、张文政硕士分别为本文的第三、四、五作者,南京航空航天大学为第一单位。
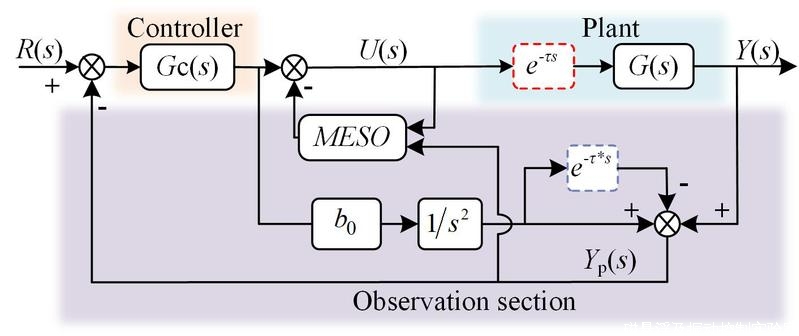
图1 改进观测器的结构框图
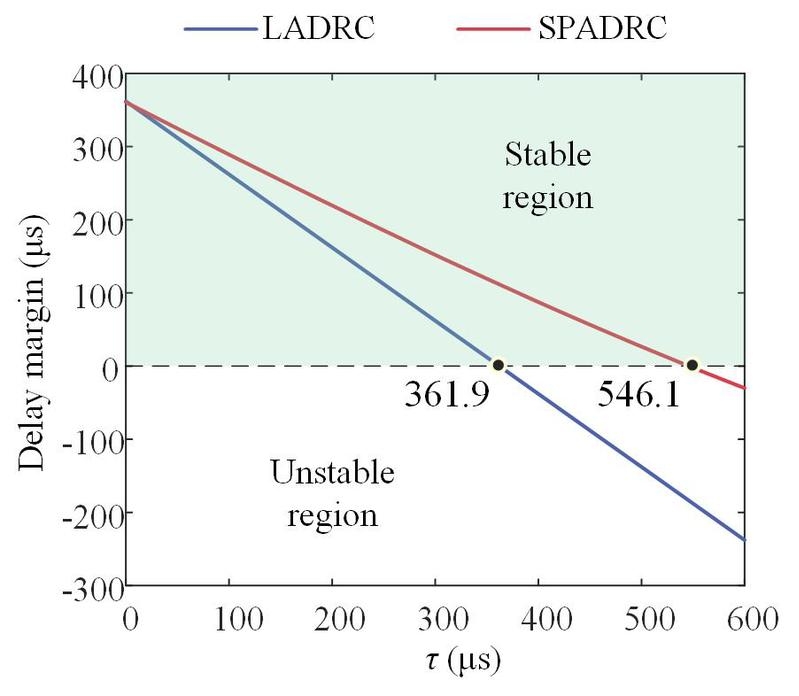
图2 不同时滞量下系统稳定性分析
在磁悬浮转子(MSR)系统中,各种时滞元素的存在是不可避免的。当磁悬浮转子系统存在较大时滞时,控制量无法及时响应系统动态,导致系统抗扰动能力下降,甚至可能引起系统振荡或发散。为了解决这些问题,本文提出了一种自适应Smith预测自抗扰控制器(SP-ADRC)。该控制器由改进的SP-ADRC与互相关时滞辨识器组成。首先,改进的Smith预估自抗扰控制器利用模型辅助扩张状态观测器(MESO)对系统进行扰动观测,并使系统等效为易处理的二阶积分系统,通过对等效后的系统进行Smith预估器设计,补偿时滞对磁悬浮转子系统产生的影响。其次,本文提出一种互相关时滞辨识器,通过对系统输入和输出信号进行数据处理与互相关辨识运算,实时获取系统内部的时滞量。最后将辨识结果引入Smith预估器中,实现对系统内部的时滞因素的自适应补偿。仿真和试验结果显示,提出的算法能有效提升系统性能,并对系统时滞具有良好的自适应性。这一成果对于磁悬浮转子系统的时滞控制研究具有重要意义。
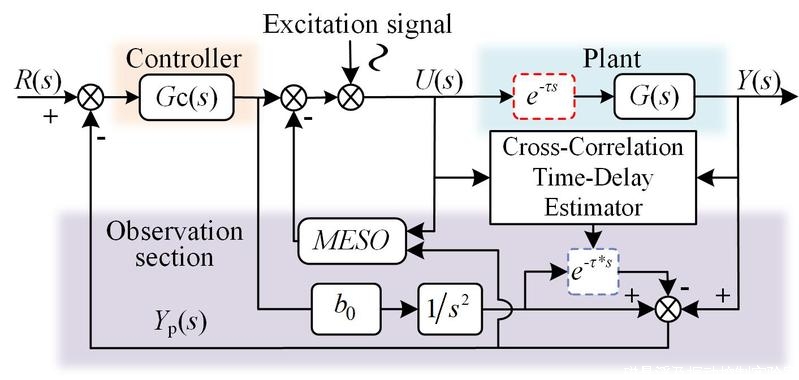
图3 自适应SP-ADRC结构框图
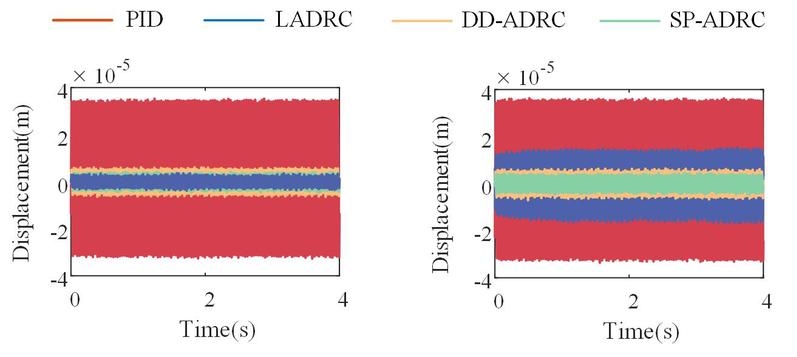
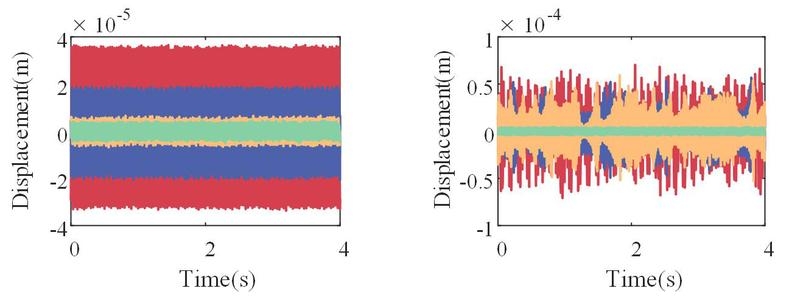
图4 不同时滞下控制效果对比
论文链接:待更新